Kollaboratív robot - együttműködő robot. Az emberrel egy munkatérben képes dolgozni, mert érzékeli az ütközéseket, megáll, megakadályozva a baleseteket..
A cobotok (kollaboratív robotok) széles körben alkalmazhatók az ipar számos területén. Előnyük, hogy alkalmasak emberrel egy térben dolgozni. Kifinomult érzékelőikkel érzékelik az ütközéseket és azonnal reagálnak. Elkerülik a balesetveszélyes helyzeteket.
Nézze meg a különböző megoldásokat:
Kobotos handling
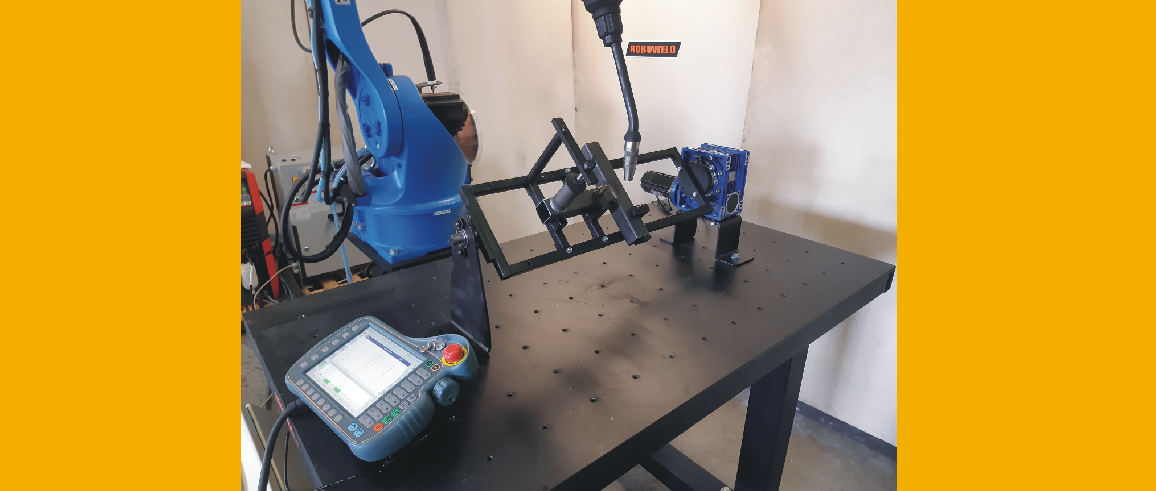
Kobotos hegesztés
E-mail:
Ajánlatkérés - klikk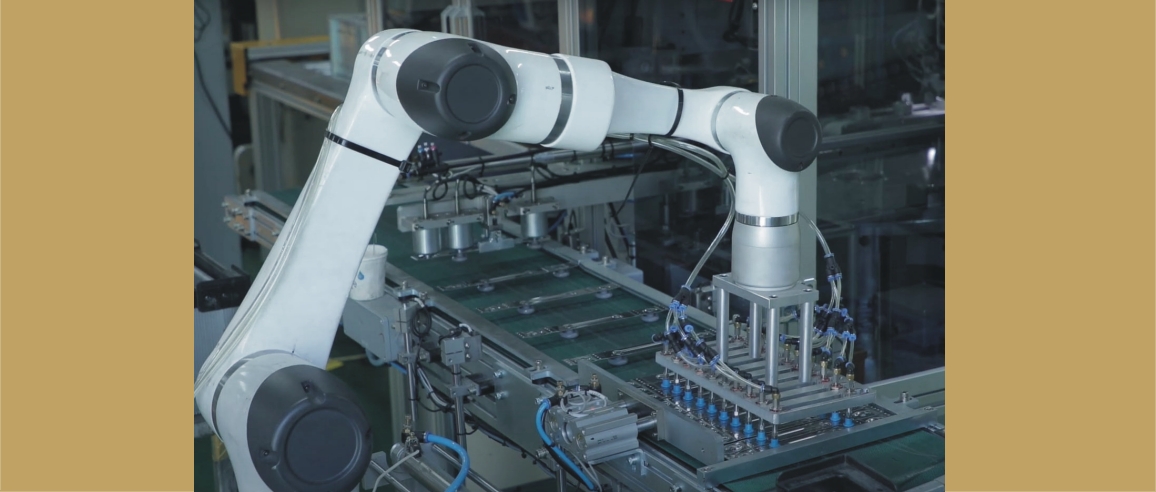
Vezérlőjükben több program is futhat egyszerre így különféle munkafolyamatokat tudnak ellátni. Eldöntik, melyik munkafolyamat az aktuális és azt hajtják végre.
Új mozgások gyorsan és könnyen betaníthatók.
Kobot gyors programozása
A programozáshoz nem szükséges használni a tabletet. Az általunk beállított pozíciókat a robot megjegyzi, majd elismétli.
Ütközés érzékelés
A kobot ütközés érzékelésekor megáll. Újraindulás előtt kis mozgásokkal érzékeli, hogy fenn áll-e még az akadály. Ha az akadály elhárult folytatja a mozgást.

Irányítsa és programozza könnyedén a Cobotot a ROS rendszerrel.
A ROS rendszer közvetlen kapcsolatot létesít a szoftver és a robotkar között. A lehetőségek köre kibővül, a kapcsolat gyorsabb lesz, könnyedén beállíthatja robotját.

Közvetlen kapcsolat EtherCAT-en keresztül.
A robotkar közvetlenül a számítógépről kapja a parancsokat, nem szükséges a robot vezérlő "doboz". Valós idejű Linux program adja ki az utasításokat. Az utasítás valós idejű, gyors és pontos. A robotkar akár 10kHz-es frekvenciával is vezérelhető.

Tökéletes mozgás.
A "Movelt" softver tökéletes mozgást tervez a robotkarnak. A mozgás folyamatos, megállásmentes. A robotkar stabilan, simán és pontosan mozog.
Vizualizáció.
A képernyőn a robot ugyanúgy mozog mint a valóságban. Pontos kontroll alatt tarthatja a mozgásokat. A képernyőn olyan mozgáspályák is megjeleníthetők, amik a valóságban nem láthatók. Láthatja a mozgásokat, még mielőtt a robotkar megmozdulna.