
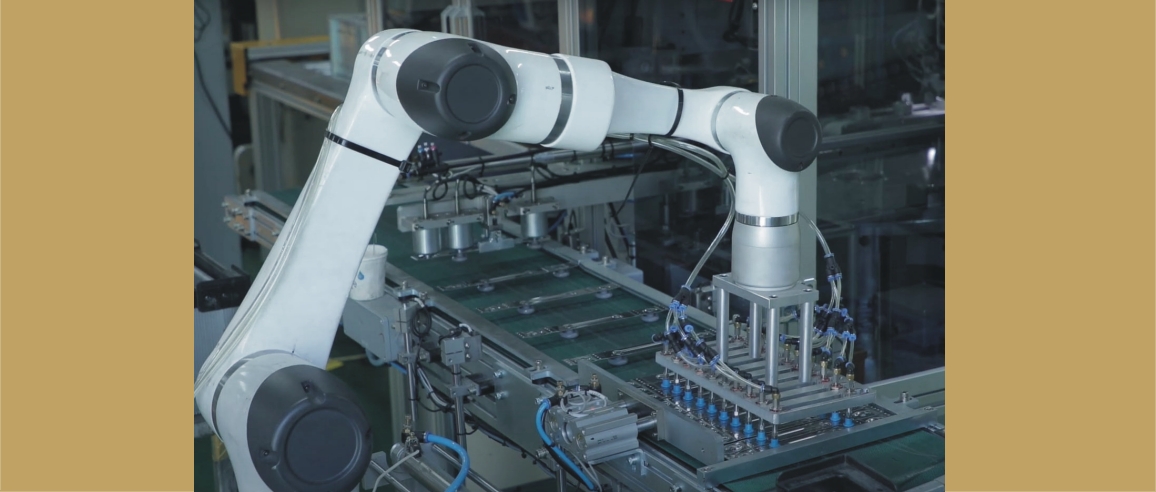
Kollaboratív robot - együttműködő robot - kobot. Az emberrel egy munkatérben képes dolgozni, mert érzékeli az ütközéseket, megáll, megakadályozva a baleseteket..



Kollaboratív robot - együttműködő robot - kobot. Az emberrel egy munkatérben képes dolgozni, mert érzékeli az ütközéseket, megáll, megakadályozva a baleseteket..